This review is for myself further learning to find notations def. & thm. easier
Source of the notes:
Wikipedia
Linear Analysis Lecture Notes
Boundary Value Problems for Linear PDEs
Inverse Problems in Imaging notes
- Common Formul
- Linear Analysis
- Notations
- Theorems and Definitions
- Morphism
- Normed Vector Space
- Vector Space Operation
- Topological Vector Space
- Bounded
- Banach Space
- Linear Map
- Operator Norm
- Dual Space
- Topologies on Banach Spaces
- Adjoint Map
- Finite Dimentional
- Sublinear
- Poset
- Totally Ordered
- Linearly Independent
- Extend
- Hahn Banach
- Support
- Dense
- Baire Category Theorem
- Interior
- Meagre
- Uniform Boundedness
- Open Mapping Theorem
- Fubini’s theorem
- Topics in Convex Optimisation
- Bayesian Inverse Problem
- Boundary Value Problems for Linear PDEs
- Inverse Problems in Imaging
- Notation
- Introduction
- Generalised Solutions
- Regularisation Theory
- Variational Regularisation
- Characteristic function
- Proper
- Convex
- Fenchel conjugat
- Lower-semicontinuous l.s.c
- Subdifferential
- Minimiser
- Weak compact convex subset 4.1.19
- Bregman distances
- Absolutely one-homogeneous functionals
- Coercive
- Level set
- J-minimising solutions
- Main result of well-posedness
- Total Variation Regularisation
- Dual Perspective
- Numerical Optimisation Methods
- Example
- Topics in Convex Optimisation
- Numerical Solution of Differential Equations
- Calculus
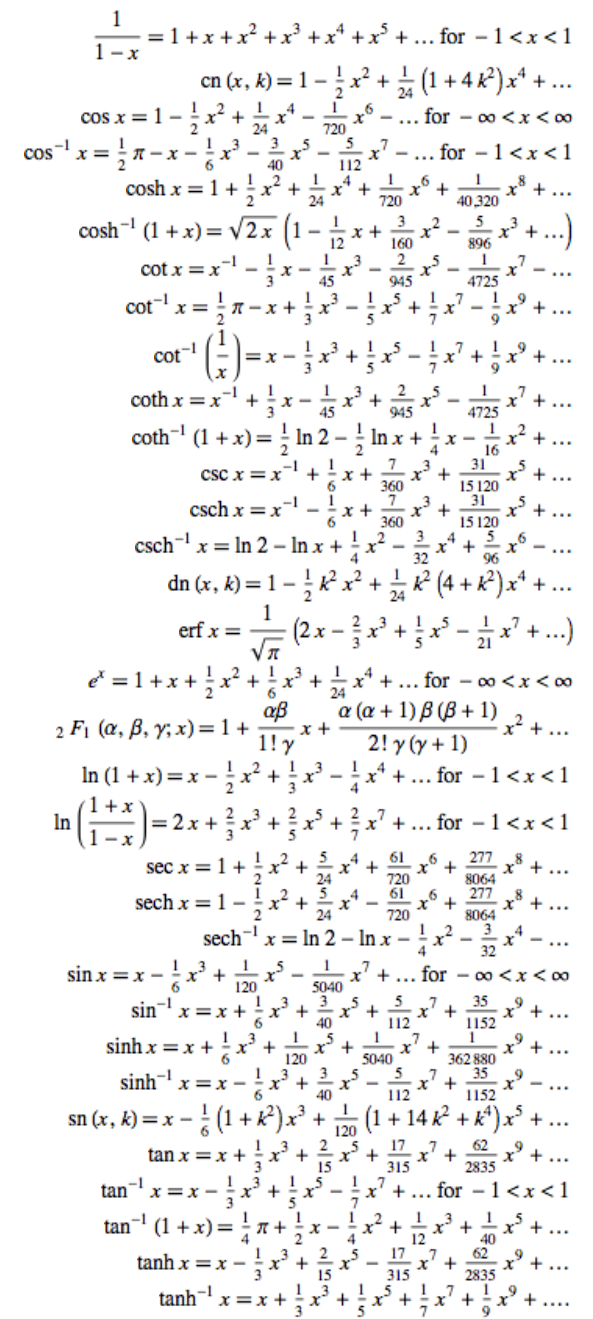
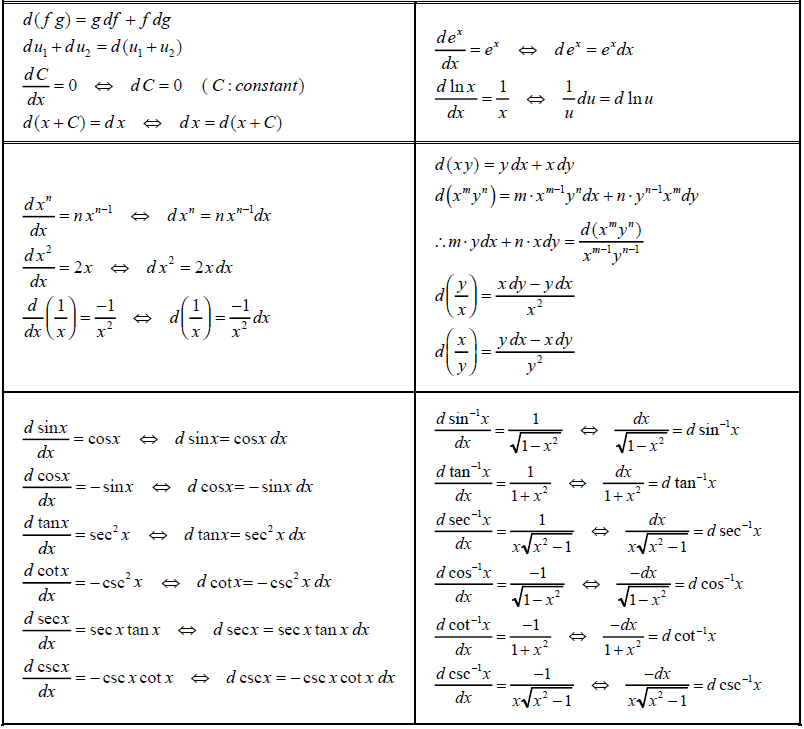
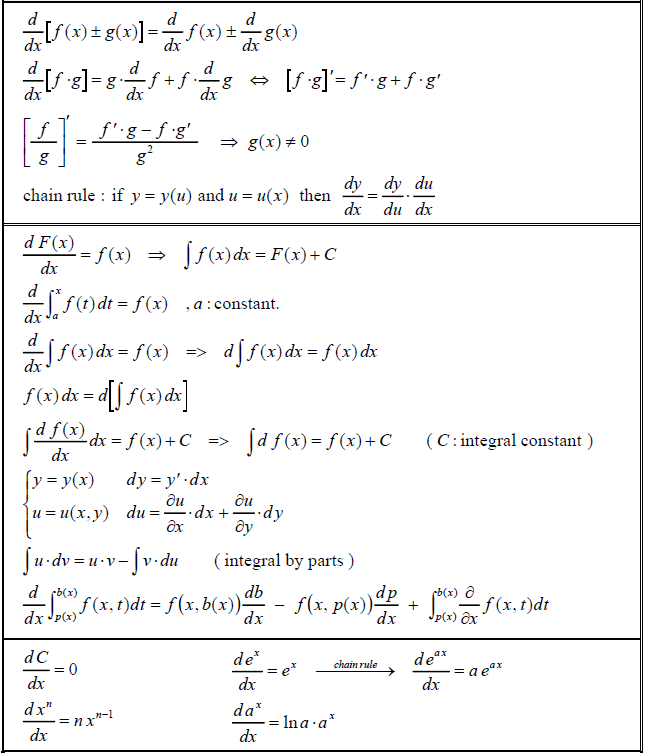
Common Formul
Quick Finding
Fourier Transform
Cauchy’s Theorem
Analytic
f.d.v.s $ \to $ finite dimentional vector space
top. $ \to $ topological
s.t. $ \to $ such that
Linear Analysis
Notations
K
- $ \mathbb{K} $ : real or complex
Delta
- $ \Delta f = \displaystyle \sum_{i=1}^{n} \frac{\partial^2 f}{\partial x_i^2} $
- $ \nabla = (\displaystyle \frac{\partial}{\partial x_1}, \cdots , \frac{\partial}{\partial}) $
Class C
- $ \mathsf{C}^k (Z) $ : the class consists of the complex valued functions on Z which have continuous derivatices of order $ \leq k $
- $ \mathsf{C}^k_c (Z) $ : subset of $ \mathsf{C}^k (Z) $ consisting function with compact support
- $ \mathsf{C}^0_b (Z) $ : the space of all continuous and bounded functions on $ Z $
- $ \mathsf{C}^2_2 (Z) $ : the class of twice continuously differentiable functions that vanish on the exterior of a bounded set
- $ \mathsf{C}^\infty_c (\mathbb{R}^n) $: its members are (complex valued) functions on $ \mathbb{R}^n $ which possess continuous derivatives of all orders and vanish outside some bounded set
- In distribution theory, it is the basic space of test function
- also used $ \mathsf{C}^\infty_0 (\mathbb{R}^n) $ and L. Schwartz’s original $ \mathcal{D}(\mathbb{R}^n) $
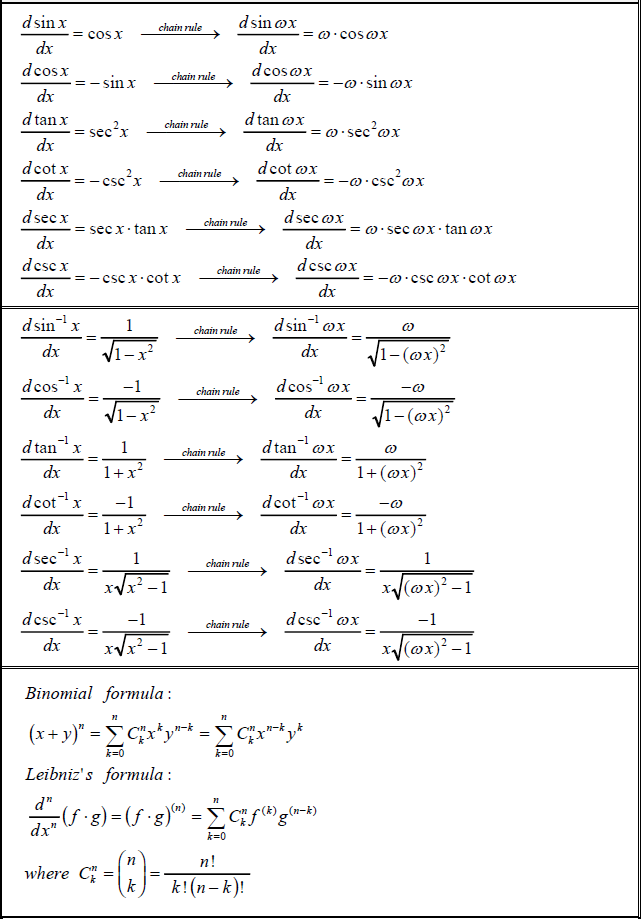
Multinomial theorem
- Concise form
- $ (x_1 + \cdots + x_n)^m = \displaystyle \sum_{\lvert \alpha \rvert = m} \frac{m!}{\alpha !} x^\alpha $
Metric
- A metric is defined on V by $ d(v,w) = \lVert v - w \rVert $
Space
- $ \mathfrak{L} (V, W) $ the space of linear maps $ V \to W $
- $ \mathfrak{B} (V, W) $ the space of bounded linear maps $ V \to W $
- $ \mathfrak{K} (V, W) $ the space of compact operators
Set theoretic Support
- The set-theoretic support of $ f : X \to \mathbb{R} $ where X arbitrary set, written supp(f), is the set of points in X where f is non-zero
$ supp(f) = { x \in X \mid f(x) \neq 0 } $- If $ f(x) = 0 $ for all but a finite number of points x in X, then f is said to have finite support
Test function
- $ C^\infty_0 $ test functions are the test function with the following properties
- infinitely differentiable
- compact [Support]
- All of it derivatives will vanish smoothly
Inner product
- Inner product: $ f_v(w) $ $ = < w, v > $
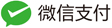
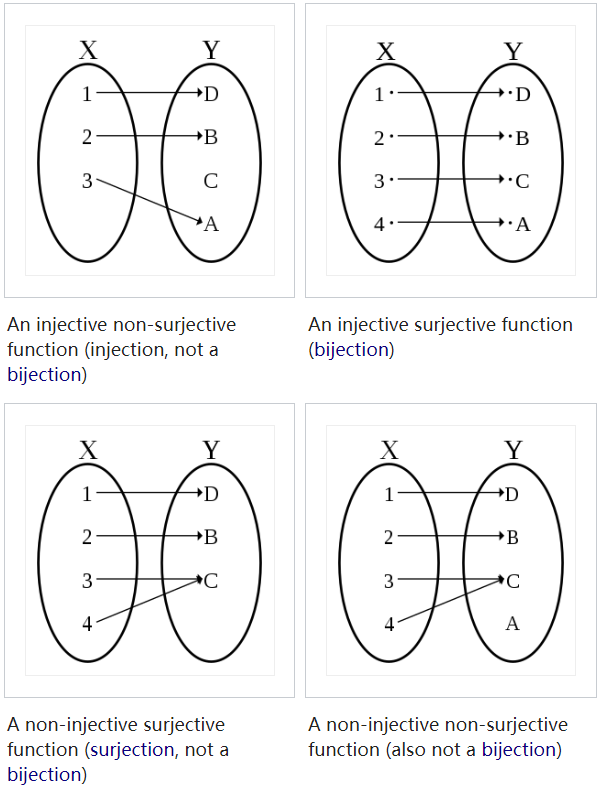
Jections
- Injections $ \hookrightarrow $
- Surjections $ \twoheadrightarrow $
- Bijections $ \xrightarrow{\sim} $
Complex
- $ \lvert z \rvert = \sqrt{x^2 + y^2} = \rho $ the length of the complex number z
- $ x = \rho \cos \theta , \; y = \rho \sin \theta $
$ z = \rho (\cos \theta + i \sin \theta) $ - Crucial identity
$ e^{i\theta}= \cos \theta + i \sin \theta $
$ z = \rho e^{i\theta} ,\; \rho > 0 ,\; \theta $ real
$ e^{i\theta + 2i\pi m} = e^{i\theta},\; m \in \mathbb{Z}$
Function Space
- $ C^0 (U) = \lbrace u: U \to \mathbb{R} \mid u $ continuous }
- $ C (\bar{U}) = \lbrace u: \in C(U) \mid u $ uniformly continuous }
- $ C^k (U) = \lbrace u: U \to \mathbb{R} \mid u $ is k-times continuously differentiable }
- $ C^\infty (U) = \cap_{k=0}^{\infty} C^k (U) = C^\infty (\bar{U}) = \cap_{k=0}^{\infty} C^\infty (\bar{U}) $
- $ L_p \mathrm{or} L^p $ function space
- $ L_p (U) = \lbrace u : U \to \mathbb{R} \mid \lvert u \rvert_{L^p(U)} < \infty \rbrace $ where u is Lebesgue measurable
- $ \lVert u \rVert_{L^p(U)} = \displaystyle (\int_{U} \lvert f \rvert^p dx )^{\frac{1}{p}}, (1< p < \infty) $
- $ L_p (U) = \lbrace u : U \to \mathbb{R} \mid \lvert u \rvert_{L^p(U)} < \infty \rbrace $ where u is Lebesgue measurable
Convolution
- If $ f, g : \mathbb{R}^n \to \mathbb{C} $, then the convolution is :
- $ (f \star g)(x) = \displaystyle \int_{\mathbb{R}^n} f(y) g(x-y) dy $
- If $ f, g, h \in C_0^\infty (\mathbb{R}^n) $
- $ f \star g = g \star f $
- $ f \star (g \star h) = (f \star g) \star h $
- $ \displaystyle \int_{\mathbb{R}^n} (f \star g)(x) dx = \displaystyle \int_{\mathbb{R}^n} f (x) dx \displaystyle \int_{\mathbb{R}^n} g (x) dx $
- Support $ f \in L_{loc.}^1 (\mathbb{R}^n), g \in C_0^k (\mathbb{R}^n) $ for some $ k \geq 0 $, then $ (f \star g) \in C^k(\mathbb{R^n}) $ and
- $ D^\alpha(f \star g) = f \star D^\alpha g , \lvert \alpha \rvert \leq k $
Null Sequence
- Null sequence $ \lbrace \sigma_j \rbrace_{j \in \mathbb{N}} $ is a sequence converges to a limit of 0:
- $ \displaystyle \lim_{j \to \infty} \sigma_j = 0 $
Theorems and Definitions
Morphism
- A category $ \mathsf{C} $ consists of
- a class $ Obj(\mathsf{C}) $ of objects of the category
- for every two objects $ A $, $ B $ of $ \mathsf{C} $, a set $ Hom_\mathsf{C} (A, B) $ of morphisms, with the properties below:
- For every object $ A $ of $ \mathsf{C} $,
$ \exists I_A \in Hom_\mathsf{C} (A, A) $ the identity of $ A $ - One can compose morphism:
Two morphisms $ f \in Hom_\mathsf{C}(A, B) $ and $ g \in Hom_\mathsf{C}(B, C) $ determine a morphism $ gf \in Hom_\mathsf{C}(A, C) $
There is a function (of sets)
$ Hom_\mathsf{C}(A, B) \times Hom_\mathsf{C}(B, C) \to Hom_\mathsf{C}(A, C) $
and the image of the pair $ (f, g) $ is denoted $ g f $ - Associative: $ h \in Hom_\mathsf{C}(C, D) $
$ (hg)f = h(gf) $ - Identity morphisms are identities
$ f I_A = f, \; \; I_B f = f $ - the sets $ Hom_\mathsf{C} (A, B), \; Hom_\mathsf{C} (C, D) $ be disjoint unless $ A = C, B = D $
- For every object $ A $ of $ \mathsf{C} $,
-
Homomorphism
A homomorphism is a map between two algebraic structures of the same type, that preserves the operations of the structures
Formally, a map $ {\displaystyle f:A\to B} $ preserves an operation $ \mu $ of arity $ k $, defined on both $ A $ and $ B $ if
$\displaystyle f(\mu_{A}(a_{1},\ldots ,a_{k}))=\mu_{B}(f(a_{1}),\ldots ,f(a_{k})), $
for all elements $ a_1, …, a_k \in A $ -
Endomorphism
A morphism od an object $ A $ of a category $ \mathsf{C} $ to itself
$ Hom_\mathsf{C}(A, A) $ is denoted $ End_\mathsf{C} (A) $ - Mono-morphism (or Monic)
- A function $ f : A \to B $ is a mono-morphism (or monic) if holds:
for all sets $ Z $ and all functions $ \alpha^\prime, \alpha^{\prime\prime} : Z \to A $
(for all objects $ Z $ of $ \mathsf{C} $ and all morphisms $ \alpha^\prime, \alpha^{\prime\prime} \in Hom_\mathsf{C}(Z, A) $ )
$ f \circ \alpha^\prime = f \circ \alpha^{\prime\prime} \to \alpha^\prime = \alpha^{\prime\prime} $ - A function is injective iff it is a monomorphism
- A function $ f : A \to B $ is a mono-morphism (or monic) if holds:
- Epimorphism
- for all objects $ Z $ of $ \mathsf{C} $ and all morphisms $ \beta^\prime, \beta^{\prime\prime} \in Hom_\mathsf{C}(B, Z) $
$ \beta^\prime \circ f = \beta^{\prime\prime} \circ f \to \beta^\prime = \beta^{\prime\prime} $ - A function is surjective iff it is epimorphism
- for all objects $ Z $ of $ \mathsf{C} $ and all morphisms $ \beta^\prime, \beta^{\prime\prime} \in Hom_\mathsf{C}(B, Z) $
- Isomorphism
- A morphism $ f \in Hom_\mathsf{C} (A, B) $ is isomorphism if it has a (two sided) inverse under composition: that is
if $ \exists g \in Hom_\mathsf{C}(B, A) $ s.t. $ gf = I_A, fg = I_B $ - The inverse of an isomorphism is unique
- prop.
- Each identity $ I_A $ is an isomorphism and is its own inverse
- If $ f $ is an isomorphism, then $ f^{-1} $ is also and $ (f^{-1})^{-1} = f $
If $ f, g $ are isomorphisms, the $ gf $ is also and $ (gf)^{-1} = f^{-1}g^{-1} $
- A morphism $ f \in Hom_\mathsf{C} (A, B) $ is isomorphism if it has a (two sided) inverse under composition: that is
-
Endomorphism
An endomorphism is a homomorphism whose domain = codomain, or
A morphism whose source is equal to the target
- Automorphism
An automorphism is an endomorphism also an isomorphism
Normed Vector Space
- Normed Vector Space is a vector space (v.s.) V with a norm $ \lVert \cdot \rVert \ : \ V \to \mathbb{R}, \ v \mapsto \lVert v \rVert $ satisfying:
- $ \lVert v \rVert \geqslant \ \forall \ v \in V \ \mathrm{and} \ \lVert v \rVert = 0 \ \mathrm{iff} \ v = 0 $ (pos. def)
- $ \lVert \lambda v \rVert = \lvert \lambda \rvert \lVert v \rVert $ for every $ \lambda \in \mathbb{k} $ and $ v \in V $ (pos. homogeneity)
- $ \lVert v \ + \ w \rVert \ \leqslant \ \lVert v \rVert + \lVert w \rVert $ for every $ v, w \in V $ (triangle ineq.)
- If $ V $ is a separable normed space, then $ V $ embeds isometrically into $ l_\infty $
Vector Space Operation
- Vector Space Operations are continuous maps
- $ \mathbb{K} \times V \to V , (\lambda , v) \mapsto \lambda v $ (scalar multi.)
- $ V \times V \to V , (v , w) \mapsto v + w $ (addition)
Topological Vector Space
- Topological Vector Space (top.) is a vector space together with a topology which makes the vector space operations continuous and points are closed
Bounded
- Let V be a topological vector space and $ B \subset V $
We say that B is bounded if
for every open neighbourhood u of 0, there exists $ t > 0 $
s.t. $ sU \supset B \; \forall \; s \geq t $
Banach Space
- a Banach Space is a normed vector space that is complete as a metric space
i.e. every Cauchy sequence converges - Let V be a normed space and W a Banach space. Then $ \mathfrak{B} (V, W) $ is a Banach space
- Let V be a normed v.s. then $ V^{\star} $ is a Banach space
- Vector-valued Liouville’s Theorem
Let X be a comple Banach Space, and $ f: \mathbb{C} \to X $ a bounded analytic function
then $ f $ is constant
Linear Map
-
In any topological vector spaces V, W ;
a linear map $ T: V \to W $ is countinuous iff it is countinuous at 0 -
T is bounded if $ T(B) $ is bounded for any bounded $ B \subset V $
Fact.
- If V,W are normed v.s., a linear map $ T : V \to W $ is bounded iff
there is a $ \lambda > 0 $ s.t. $ T (B_1(0)) \subseteq B_\lambda (0) $
i.e. $ \lVert TV \rVert \leq \lambda \; \forall \; v \in V $ with $ \lVert v \rVert \leq 1 $
Operator Norm
- Let V,W be normed v.s.
The operator norm of a linear map $ T : V \to W $ is
- Denote by $ \mathfrak{L} (V, W) $ the space of linear maps $ V \to W $
by $ \mathfrak{B} (V, W) $ the space of bounded linear maps $ V \to W $
Fact.
- The operator norm $ \lVert \cdot \rVert $ is a norm on $ \mathfrak{B} (V, W) $
Prop.
- Let V,W be normed v.s.
Then a linear map $ T : V \to W $ is bounded iff it is countinous
Dual Space
- Let V be a top. v.s.
The $ V^{\star} $ (top.) dual space of V is the space of all continuous linear maps $ V \to \mathbb{K} $- We call $ \mathfrak{L} (V, \mathbb{k}) $ the algebraic dual of V
-
Let V be a normed v.s.
The double dual of V is the dual space of $ V^{\star} $
i.e. $ V^{\star \star} = (V^{\star})^{\star} $
$ V^{\star\star} $ is also called bidual or the second dual of $ V $
For each $ x \in X $, define $ \hat{x} : X^\star \to $ scalars by $ \hat{x}(f) = f(x) $
then $ \hat{x} $ is linear, and $ \lvert \hat{x} (f) \rvert = \lvert f(x) \rvert \leq \lVert f \rVert \cdot \lVert x \rVert $
so $ \hat{x} \in X^{\star\star} $ with $ \lVert \hat{x} \rVert \leq \Vert f \rVert $ - If X be a normed space
The dual space $ X^\star $ is the space of all bounded linear functionals on $ X $
This is a normed space with norm $ \lVert f \rVert = \sup{\lvert f(x) \rvert : x \in B_X } $ , where $ B_X = { x \in X : \lVert x \rVert \leq 1} $
$ X^\star $ is always complete
Fact.
- The map $ \phi : V \to V^{\star \star} $ , $ v \mapsto \tilde{v} $ where $ \tilde{v} (f) = f(v) $ is bounded and linear
-
A Banach space is reflexive if $ \phi $ is bijection
-
Dual operators
Define the dual operator of $ T $ by $ T^\star : X^\star \to Y^\star , T^\star (g) = g \circ T $ for $ g \in Y^\star $
This is well-defined as $ g \circ T $ is a composition of bounded linear operators
Furthermore, $ T^\star $ is linear and bounded, since
Topologies on Banach Spaces
- Let $ (X, \lvert . \rvert) $ denote a real Banach space
- $ \displaystyle X^\star = { l : X \to R \ \mathrm{linear \ s.t. } \lvert l \rvert_{X^\star} = \sup_{x\neq 0} \frac{\lvert l(x) \rvert}{\lvert x \rvert_X} \leq \infty } $
- Topologies on $ X $
- The strong topology $ x_n \displaystyle \longrightarrow_{X} x $ defined by
$ \lvert x_n - x \rvert_X \to 0 \ (n \to +\infty) $ - The weak topology $ x_n \displaystyle \longrightarrow_{X} x $ defined by
$ l(x_n) \to l(x) \ (n \to +\infty) $ for every $ l \in X^\star $
- The strong topology $ x_n \displaystyle \longrightarrow_{X} x $ defined by
- Topologies on $ X^\star $
- The strong topology $ l_n \displaystyle \longrightarrow_{X} l $ defined by
$ \lvert l_n - l \rvert_{X^\star} \to 0 \ (n \to +\infty) $
or equivalently,
$ \sup_{x\neq 0} \frac{\lvert l_n(x) - l(x) \rvert}{\lvert x \rvert_X} \to 0 \ (n \to +\infty) $ - The weak topology $ x_n \displaystyle \longrightarrow_{X} x $ defined by $ l(x_n) \to l(x) \ (n \to +\infty) $ for every $ l \in X^\star $
- The strong topology $ l_n \displaystyle \longrightarrow_{X} l $ defined by
Adjoint Map
- Let V,W be normed v.s. and $ T \in \mathfrak{B}(V, W) $
Then the adjoint map $ T^{\star} : W^{\star} \to V^{\star} $ is defined by
$ [T^{\star} f] v = f (T v) \; \mathrm{for} \; f \in W^{\star}, v \in V $
Fact.
- $ T^\star f $ is indeed in $ V^\star = \mathfrak{B} (V, \mathbb{K}) $ and $ \lVert T^\star \rVert \leq \lVert T \rVert $
Finite Dimentional
- Any finite-dimensional vector space can be identified with $ \mathbb{K}^n $ by choosing a basis. there n is the dimension
- Two norms $ \lVert \cdot \rVert $ and $ \lvert \lVert \cdot \rVert \rvert $ on a vector space V are equivalent iff
there exists a constant $ C > 0 $ s.t.
$ C^{-1} \lvert \lVert v \rVert \rvert \leq \lVert v \rVert \leq C \lvert \lVert v \rVert \rvert $ for all $ v \in V $
Prop.
- All norms on a f.d.v.s. are equivalent
- In any f.d.v.s., the closed unit ball is compact
- Every f.d. normed v.s. is a Banach space
- Let V be a normed v.s. and $ W \subset V $ be a f.d. subspace, then W is closed
Thm.
- Let V be a normed v.s. s.t. $ \overline{B_1(0)} $ is compact. Then V is finite-dimentional
Sublinear
- a map $ p : V \to \mathbb{R} $ is sublinear if
- $ p( \alpha v ) \ = \ \alpha \ p(v) \; \forall v \in V , \ \alpha \geq 0 $
- $ p(v+w) \ \leq \ p(v) + p(v) \; \forall v,\ w \in V $
Poset
-
A partially ordered set (poset) is a set P with a binary relation $ \leq $ s.t. for all $ x, y \in P $ either $ x \leq y $ or $ x \nleq y $ , and
$ x \leq x $ (reflexive)
$ x \leq y , y \leq z \; \Rightarrow \; x \leq z $ (transitive)
$ x \leq y , y \leq x \; \Rightarrow \; x = y $ (antisymmetric) -
Let P be a poset. An element $ m \in P $ is maximal if $ m \leq x \to m = x $
Totally Ordered
- Let P be a poset. a subset $ T \subset P $ is called totally ordered (or a chain) if
$ x \nleq y \Rightarrow y \leq x $
i.e.
either $ x \leq y or y \leq x $
Linearly Independent
- In a v.s. V, elements $ v_1, \cdots , v_k $ are linearly independent if
$ \sum_{i = 1}^{k} \alpha_i v_i = 0 \; \to \; \alpha_1 = \alpha_2 = \cdots = 0 $ - a set $ S \subset V $ is linearly independent if any finite subset is
- A basis of V is a set $ B \subset V $ that is linearly independent and such that every element of V is a finite linear combination of elements in B
Prop.
- Let $ V \neq \lbrace 0 \rbrace $ be a vector space and $ S \subset V $ linearly independent. Then V has a basis B s.t. $ S \subset B $
Extend
- Given vector spaces $ W \subset V $ , linear maps $ g : W \to \mathbb{K} , f : V \to \mathbb{K} $ , we say that f extends g if $ f \lvert_{w} = g $
Hahn Banach
- Let V be a real vector space, a subspace $ W \subset V , p : V \to \mathbb{R} \; \mathrm{sublinear}, g: W \to \mathbb{R} $ linear s.t.
Then there is $ f : V \to \mathbb{R} $ linear s.t. $ f\lvert_W = g $ and
Cor.
- Let $ V \in \mathbb{K} $ be a normed v.s., $ W \subset V $ a subspace
For any $ g \in W^\star $ there exists $ f\in V^{star} $
s.t. $ f\lvert_{W} = g $ and $ \lVert f \rVert \leq \lVert g \rVert $ - Let V be a normed vector space and $ v \in V $
Then $ \exists f_v \in V^\star $ s.t. $ \lVert f_v \rVert = 1 $ and $ f_v (V) = \lVert v \rVert $- Here $ f_v $ is called a support functional for V
- Let V be a normed v.s. and $ v \in V $ , then
$ v = 0 \Leftrightarrow f(v) = 0 \; \forall \; f \in V^\star $
In particular, $ V^\star \neq 0 $ - Let V be a normed v.s., $ v, w \in V , \ v \neq w $ . Then
there exists $ f \in V^\star $ s.t. $ f(v) \neq f(w) $
Prop.
- The map $ \phi : V \to V^{\star \star } $ is an isometry
($ d_Y(f(x),f(y)) = d_X(x,y) $ for a map $ f: X \to Y $) that
$ \lVert \phi (v) \rVert = \lVert v \rVert $ - Let V, W be a normed v.s.
For any $ T \in \mathfrak{B} (V, W) $ , the dual map $ T^\star \in \mathfrak{B} (W^\star, V^\star ) $ satisifies $ \lVert T^\star \rVert = \lVert T \rVert $
Support
- If the domain of f is a top. space, the support of f is the smallest closed set containing all points not mapped to zero
Closed Support:
- The support of f is defined topologically as the closure of the subset of X where f is non-zero
- support of a function $ f : X \to \mathbb{C} $ is the closure of the set $ \lbrace x \in X \mid f(x) \neq 0 \rbrace $; it is the closed subset of X
i.e. $ supp(f) := \overline{\lbrace x \in X \mid f(x) \neq 0 \rbrace} $ $ = \overline{f^{-1}(\lbrace 0 \rbrace^c)} $
Compact Support:
- The closed support is a compact subset of $ X $
- If $ X $ is the real line, or n-dimensional Euclidean space, then a function has compact support iff it has bounded support
- Each function is nonzero on a closed and bounded interval, but is zero everywhere else
Essential Support:
- If X is a top. measure space with a Borel measure μ
the essential support of a measurable function $ f : X \to \mathbb{R} $, written ess supp(f), is defined to be the smallest closed subset $ F $ of $ X $ such that $ f = 0 $ μ-almost everywhere outside $ F $
Equivalently, ess supp(f) is the complement of the largest open set on which f = 0 μ-almost everywhere $ \displaystyle \mathrm{ess supp}(f) := X \setminus \bigcup \lbrace \Omega \subset X \mid \Omega $ is open and $ f = 0 $ μ-almost everywhere in $ \Omega \rbrace $
Support Function:
- The support function $ h_A : \mathbb{R}^n \to \mathbb{R} $ of a non-empty closed convex set A in $ \mathbb{R}^n $ is given by
$ h_A (x) = sup \lbrace x \cdot a : a \in A \rbrace , \; x \in \mathbb{R}^n $
Supporting Functional:
In convex analysis and mathematical optimization, the supporting functional is a generalization of the supporting hyperplane of a set
- Let X be a locally convex top. space and $ C \subset X $ be a convex set, then
the continuous linear functional $ \phi : X \to \mathbb{R} $ is a supporting functional of C at the point $ x_0 $
if $ \phi(x) \leq \phi(x_0) $ for every $ x \in C $ - If $ h_C : X^\star \to \mathbb{R} $ is a support function of the set C, then
if $ h_C (x^\star) = x^\star (x_0) $ , it follows that
$ h_C $ defines a supporting functional $ \phi : X \to \mathbb{R} $ of $ C $ at the point $ x_0 $ s.t.
$ \phi(x) = x^\star (x) $ for any $ x \in X $ - If $ \phi $ is a supporting functional of the convex set C at the point $ x_{0} \in C $ such that
$ \displaystyle \phi (x_{0}) = \sigma = \sup_{x \in C} \phi (x) > \inf_{x \in C} \phi (x) $
then $ H = \phi^{-1} (\sigma ) $ defines a supporting hyperplane to C at $ x_{0} $
Dense
- If X is a metric space, the $ Y \subset X $ is dense if $ \overline{Y} = X $
i.e. $ Y \cap B_r (X) \neq \varnothing \; \forall \; x \in X , r > 0 $
Baire Category Theorem
- Let X be a complete metric space.
For any sequence of open dense subsets $ U_j \subset X $ , $ \displaystyle\bigcap_j U_j $ is dense in $ X $
cor.
- Let $ X $ be a complete metric space. Let $ A_j \subset X $ be a sequence of closed subsets s.t.
$ \bigcup_j A_j $ has nonempty interior, i.e. it contains some ball
Then at least one of the $ A_j $ has nonempty interior
Interior
- The point x is an interior point of S. The point y is on the boundary of S
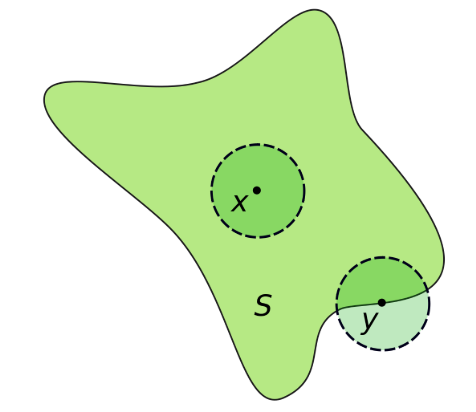
- Interior point
If $ S $ is a subset of a Euclidean space, then $ x $ is an interior point of $ S $ if there exists an open ball centered at $ x $ which is completely contained in S - Interior of a set
The interior of a set $ S $ is the set of all interior points of $ S $
it is denoted $ int(S) $, $ Int(S) $ or $ S^o $
and has the following properties:- $ int(S) $ is an open subset of $ S $
- $ int(S) $ is the union of all open sets contained in $ S $
- $ int(S) $ is the largest open set contained in $ S $
- A set $ S $ is open iff $ S = int(S) $
- $ int(int(S)) = int(S) $ (idempotence)
- If $ S $ is a subset of $ T $, then $ int(S) $ is a subset of $ int(T) $
- If $ A $ is an open set, then $ A $ is a subset of $ S $ iff $ A $ is a subset of $ int(S) $
Meagre
- Let X be a metric space
- A subset $ Y \subset X $ is nowhere dense if $ int( \overline{Y} ) = \varnothing $ ,
( if the interior of its closure is empty )
i.e. , if $ Y $ is not dense in any ball - A subset $ Z \subset X $ is meagre or of the first category if
there are countably many set $ Y_j \subset X $ that are nowhere dense and $ Z = \bigcup_j Y_j $
( if it is a union of countably many nowhere dense subsets ) - A subset $ U \subset X $ is nonmeagre or of the second category if
it is not meagre
( it contains a countable union of open and dense sets ) - A subset $ R \subset X $ is residual if
its complement is meagre
- A subset $ Y \subset X $ is nowhere dense if $ int( \overline{Y} ) = \varnothing $ ,
fact.
- $ Y \subset X $ is nowhere dense
$ \Leftrightarrow \; \overline{Y} $ is nowhere dense
$ \Leftrightarrow \; X \backslash \overline{Y} $ is open dense
Cor.
- Let $ X $ be a complete metric space. Then $ X $ is of second category
- Let $ X $ be a complete metric space. Then residual sets are non-meagre and dense
- Let $ X $ be a complete metric space and $ U \subset X $ open.
Then $ U = \varnothing $ or $ U $ is of the second category
Uniform Boundedness
-
Principle of uniform boundedness
Let X be a complete metric space
Let $ (f_\lambda)\mid_{\lambda \in \wedge} $ be a family of continuous functions $ f_\lambda : X \to \mathbb{R} $
If $ (f_\lambda)\mid_{\lambda \in \wedge} $ is pointwise bounded,
i.e., $ \sup_{\lambda \in \wedge} \lvert f_\lambda (x) \rvert \leq \infty $ for every $ x \in X $,
then there is a ball $ B_r (X_c) \subset X $ s.t.
$ ( f_\lambda ) $ is uniformly bounded on $ B_r(X_0) $
i.e., $ \sup_{\lambda \in \wedge} \sup_{x \in B_r (x_0)} \lvert f_\lambda (x) \rvert \leq \infty $ -
Banach-Steinhaus Theorem
Let $ V $ be a Banach Space and $ W $ a normed v.s.
Let $ (T_\lambda)\mid_{\lambda \in \wedge} \subset \mathfrak{B}(V,W) $ be pointwise bounded,
i.e., $ \sup_{\lambda \in \wedge} \lVert T_\lambda v \rVert \; \forall \; v \in V $
Then $ ( T_\lambda) $ is uniformly bounded
i.e., $ \sup_{\lambda \in \wedge} \lVert T_\lambda \rVert \leq \infty $
Open Mapping Theorem
-
A map between topological spaces is open iff it maps open ses to open sets
-
Open Mapping Theorem
Let $ V, W $ be Banach Spaces and $ T \in \mathfrak{B} (V, W) $- if $ T $ is surjective, then $ T $ is open
- if $ T $ is bijective, then $ T^{-1} \in \mathfrak{B}(W, V) $
Fubini’s theorem
- If $ f(x,y) $ is $ X \times Y $ integrable, that $ f(x,y) $ is measrable function and $ \displaystyle \int_{X \times Y} \lvert f(x,y) \rvert d(x,y) < \infty $ then
- $ \displaystyle \int_{X} (\int_{Y} f(x,y)dy)dx = \int_{Y}(\int_{X} f(x,y) dx) dy = \int_{X \times Y}f(x,y) d(x,y) $
Topics in Convex Optimisation
Bayesian Inverse Problem
Boundary Value Problems for Linear PDEs
Complex Variables
Analytic
- $ f(z) = u(x, y) + iv(x, y) $ where $ u , v $ are real functions
We called $ f(z) $ an analytic at point $ z_0 $
if it is differentiable in a neighbourhood of $ z_0 $ - $ f(z) $ is analytic iff functions $ u , v $ satisfy Cauchy–Riemann equations
-
$ f $ is an analytic function iff dbar-Derivative
$\displaystyle \frac{\partial f}{\partial \bar{z}} = 0 $ or $ \displaystyle \frac{\partial f}{\partial z} = u_x - i u_y = v_y + i v_x $ -
Liouville’s theorem:
If $ f(z) $ is everywhere analytic (in the finite complex plane) and bounded (including infinity), then $ f(z) $ is a constant. -
Rouche’s theorem:
Let $ f(z) $ and $ g(z) $ be analytic on and inside a simple contour $ C $.
If $ |f(z)| > |g(z)| $ on $ C $, then $ f(z) $ and $ f(z) + g(z) $ have the same number of zeros inside the contour $ C $. -
Morera’s theorem:
If $ f(z) $ is continuous in a domain $ D $ and if
$ \displaystyle \oint_C f(z) dz = 0 $
for every simple closed contour $ C $ lying in $ D $,
then $ f(z) $ is analytic in $ D $. -
Maximum Principle:
If $ f(z) $ is analytic in a bounded region $ D $
and $ \lvert f(z) \rvert $ is continuous in the closed region $ \bar{D} $,
then $ \lvert f(z)\rvert $ obtains its maximum on the boundary of the region -
Minimum Principle:
If, in addition, it is non-zero at all points of $ D $, then $ \lvert f(z) \rvert $ obtains its minimum on the boundary of the region. - Laurent Series:
A function $ f(z) $ analytic in an annulus(环) $ R_1 < \lvert z - z_0 \rvert < R_2 $ may be presented by the expansion
$ f(z) = \displaystyle\sum_{m=-\infty}^{\infty} A_m(z-z_0)^m $
where $ A_m = \displaystyle \frac{1}{2i\pi} \oint_C \frac{f(z)dz}{(z-z_0)^{m+1}} $
and $ C $ is any simple closed contour in the region of analyticity enclosing the inner boundary $ \lvert z - z_0 \rvert = R_1 $.
Cauchy Riemann equations
- The Cauchy–Riemann equations on a pair of real-valued functions of two real variables $ u(x,y) $ and $ v(x,y) $ are the two equations:
- $ \displaystyle \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y} $
- $ \displaystyle \frac{\partial u}{\partial y} = - \frac{\partial v}{\partial x} $
That $ u_x = v_y , \; u_y = - v_x $
Holomorphic
- Holomorphy is the property of a complex function of being differentiable at every point of an open and connected subset of $ C $ (a domain in $ C $)
- If f is complex-differentiable at every point $ z_0 $ in an open set $ U $, we say that $ f $ is holomorphic on $ U $.
We say that $ f $ is holomorphic at the point $ z_0 $ if it is holomorphic on some neighbourhood of $ z_0 $. - In complex analysis, a function that is complex-differentiable in a whole domain (holomorphic) is the same as an analytic function
NOT true for real differentiable functions - Any holomorphic function is actually infinitely differentiable and equal to its own Taylor series (analytic)
dbar Derivative
- the dbar-derivative with respect to $ \bar{z} $
i.e. the derivative with respect to the complex conjugate of $ z $
The equations $ z = x + iy , \; \bar{z} = x - iy $
imply $ x = \displaystyle \frac{z+\bar{z}}{2} , \; y = \frac{z-\bar{z}}{2i} $
Chain rule yields
$ \displaystyle \frac{\partial}{\partial z} = \frac{1}{2} (\frac{\partial}{\partial x}-i\frac{\partial}{\partial y}) , \; \displaystyle \frac{\partial}{\partial \bar{z}} = \frac{1}{2} (\frac{\partial}{\partial x}+i\frac{\partial}{\partial y}) $
Cauchy’s Theorem
Cauchy integral theorem (also known as the Cauchy–Goursat theorem)
- Suppose that $ f(z) $ is analytic in the domain $ D $.
Then, the integral of $ f(z) $ along the boundary of $ D $ vanishes.
Green’s Theorem
- Let $ C $ be a positively oriented, piecewise smooth, simple closed curve in a plane, and let $ D $ be the region bounded by $ C $.
If $ L $ and $ M $ are functions of $ (x, y) $ defined on an open region containing $ D $ and have continuous partial derivatives there, then
$ \displaystyle \oint_C (L dx + M dy) = \int \int_D (\frac{\partial M}{\partial x} - \frac{\partial L}{\partial y}) dx dy $
where the path of integration along C is anticlockwise
Residue Theorem
-
Suppose that the function $ f(z) $ is analytic in the domain $ D $,
except at the single point $ z_0 $ where the function has a pole with residue $ g(z_0) $, namely in the neighborhood of $ z_0 $, this function can be written as
$ f(z) = \displaystyle \frac{g(z)}{z - z_0} $ where $ g(z) $ is analytic.
Then, the integral of $ f(z) $ along the boundary of $ D $ equals $ 2i\pi g(z_0) $ -
Cauchy’s Residue Theorem
- $ \oint_C f(z)dz = 2 \pi i \displaystyle \sum_{k = 1}^n \mathrm{Res} (f(z), z_k) $
- If $ z_k $ is a pole of order k, then the residue of f around $ z = z_k $ can be found by the formula:
Res $ (f , z_k) = \displaystyle \frac{1}{(k-1)!} \lim_{z\to z_k} \frac{d^{k-1}}{dz^{k-1}} ((z-z_k)^k f(z)) $ - For essential singularity case, the residues must usually be taken directly from series expansions
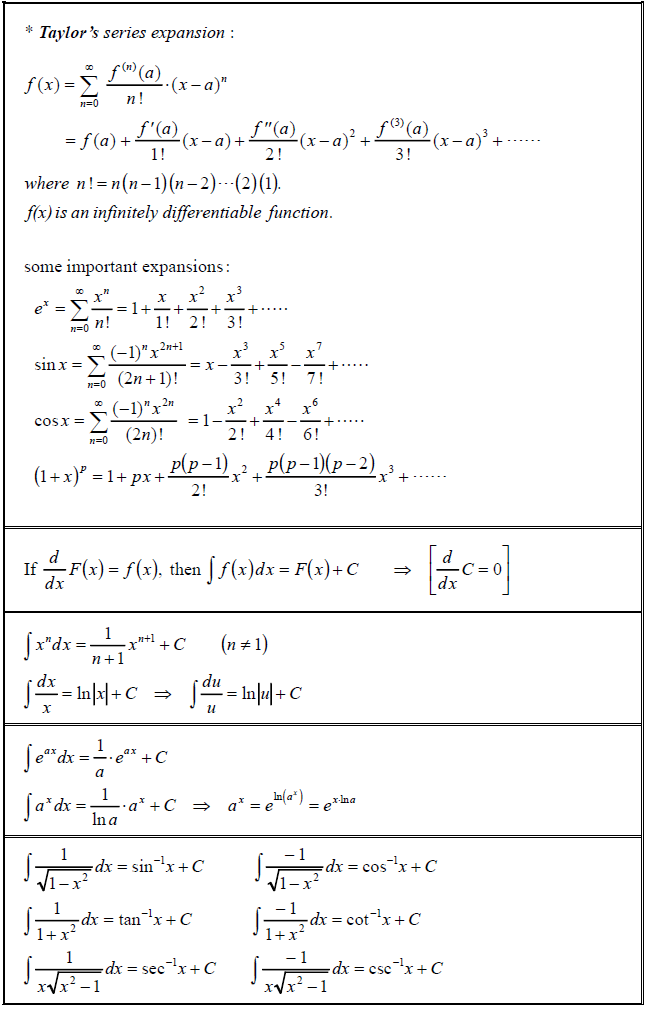
Taylor Series
-
Analytic real function can be expanded in terms of an infinite series:
where this series is valid provided that $ \lvert x - x_0 \rvert < R $ and $ R $ is called the radius of convergence -
Complexification
Let $ f(z) $ be analytic for $ \lvert z - z_0 \rvert < R $
Then $ f(z) = \displaystyle \sum_{m=0}^\infty \frac{(z-z_0)^m}{m!} \frac{d^m}{dz^m} f(z_0) $
implies $ f(\zeta) = \displaystyle \frac{1}{2i\pi}\oint_{\partial D} \frac{f(z)dz}{z-\zeta} $
implies $ \displaystyle \frac{d^m}{d\zeta^m} f(\zeta) = \frac{m!}{2i\pi}\oint_{\partial D} \frac{f(z)dz}{(z-\zeta)^{m+1}} $
Principal Value integrals:
- Let $ 0 < a < b $ and $ z_0 \in (a, b) $ be a pole of $ f(z) $.
The principal value integral is given as
$ \displaystyle PV\int_a^b f(z) dz = \lim_{\epsilon \to 0} (\int_{a}^{z_0 - \epsilon} + \int_{z_0 + \epsilon}^{b}) f(z) dz $
This notion is extended to integration over curves in the complex plane.- In the simplest cases equip the above contour of integration with a small semicircle center at $ z_0 $ and radius $ \epsilon $, denoted by $ C_\epsilon $ . Then using the parametrisation $ z_0 + \epsilon e^{i\theta} $ and letting $ \epsilon \to 0 $ , compute the contribution of this pole
Jordan Lemma
- Let $ C_R $ denote the semi-circle of radius $ R $ in the upper half complex $ z $-plane centered at the origin.
Assume that the analytic function $ f(z) $ vanishes on $ C_R $ as $ R \to \infty $ , namely
$ \lvert f(z) \rvert < K (R),\; z \in C_R $
and $ K(R) \to 0 $ as $ R \to \infty $
Then, $ \displaystyle\int_{C_R} e^{iaz} f(z) dz \to 0 $ as $ R \to \infty $ for $ a > 0 $
ExerciseB01 $ \int_{-\infty}^{+\infty} = \displaystyle \frac{sinx}{x} $
Fourier Transform
- Fourier Transforms
-
The Fourier Transform of a function $ f(x) , \; -\infty < x < \infty $ , is defined by
$ \hat{f}(\lambda) = \displaystyle \int_{-\infty}^{\infty} e^{-i\lambda x} f(x) dx, \; -\infty < \lambda < \infty $ -
The Inverse Fourier Transform of a function $ f(\lambda) , \; -\infty < \lambda < \infty $ , is defined by
$ \tilde{f}(x) = \displaystyle \frac{1}{2\pi} \int_{-\infty}^{\infty} e^{i\lambda x} \hat{f}(\lambda) d\lambda, \; -\infty < x < \infty $ -
In order to be well-defined, we need that $ f(x) \in L_2$ that is
$ \displaystyle \int_{-\infty}^{\infty} \lvert f(x) \rvert ^2 dx < \infty $ - Fourier transform of derivative
$ \widehat{f^{(n)}} (\lambda) = (i\lambda)^n \hat{f}(\lambda) $
Inverse Problems in Imaging
This note is taken from the lecture notes in the Part III course of University of Cambridge in 2019
Source of the notes:
Wikipedia
Inverse Problems in Imaging notes
Notation
-
Let $ A $ be bounded linear operators
- $ A \in \mathcal{L}(\mathcal{U}, \mathcal{V}) $ with
- For $ A : \mathcal{U} \to \mathcal{V} $
- $ \mathsf{D}(A) := U $ the domain
- $ \mathsf{N}(A) := \lbrace u \in \mathcal{U} \mid Au = 0 \rbrace $ the kernel
- $ \mathsf{R}(A) := \lbrace f \in \mathcal{V} \mid f = Au, u \in \mathcal{U} \rbrace $ the range
- A is continuous at $ u \in \mathcal{U} $
- if $ \forall ε > 0 \exists δ > 0 $ with
- if $ \forall ε > 0 \exists δ > 0 $ with
- $ A^* $ the (unique) adjoint operator of $ A $ with
- $ \langle Au, v \rangle_\mathcal{V} = \langle u, A^*v \rangle_\mathcal{U} \ \forall \ u \in \mathcal{U}, v \in \mathcal{V} $
- For a subset $ \mathcal{X} \subset \mathcal{U} $, the orthogonal complement of $ \mathcal{X} $ is defined by
- $ \mathcal{X}^\perp := \lbrace u \in \mathcal{U} \mid \langle u,v\rangle_\mathcal{U} = 0 \ \forall \ v \in \mathcal{X} \rbrace $
- Let $ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $. Then $ A $ is saide to be compact if for any bounded set $ B \subset \mathcal{U} $ the closure of its image $ \overline{A(B)} $ is compact in $ \mathcal{V} $. We denote the spave of compact operators by $ \mathcal{K}(\mathcal{U},\mathcal{V}) $.
Introduction
- Operator equations
where $ A : \mathcal{U} \to \mathcal{V} $ is the forward operator acting between some spaces
$ \mathcal{U} $ and $ \mathcal{V} $ , typically Hilbert or Banach Spaces
$ f $ are the measured data
$ u $ is the quantity we want to reconstruct from data
Well-Posed
- The well-posed problem if
- it has a solution $ \forall f \in \mathcal{V} $
- the solution is unique
- the solution depends continuously on the data i.e. small errors in the data f result in small errors in the reconstruction
Differentiation
-
Evaluation the derivative of a function $ f \in L^2 [0, \pi /2 ] $
where $ D : L^2 /[ 0, \pi /2 /] \to L^2 [ 0, \pi /2 ] $ -
Prop The operator D is unbounded from $ L^2 /[ 0, \pi /2 /] \to L^2 [ 0, \pi /2 ] $
-
Integral transform of the image:
$ u(\xi) $ is the “true” image
$ K(x,\xi) $ is the point-spread function (PSF) which models the optics of the camera
Fatou lemma
Generalised Solutions
Orthogonal decomposition
- For $ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $, we have
- $ \mathsf{R}^\perp(A) = \mathsf{N}(A^* ) $ then $ \overline{\mathsf{R}(A)} = \mathsf{N}(A^* )^\perp $
- $ \mathsf{R}^\perp(A^* ) = \mathsf{N}(A) $ then $ \overline{\mathsf{R}(A^* )} = \mathsf{N}(A)^\perp $
- Hence, we can deduce the following orthogonal decompositions
- $ \mathcal{U} = \mathsf{N}(A) \oplus \overline{\mathsf{R}(A^* )} $
- $ \mathcal{V} = \mathsf{N}(A^* ) \oplus \overline{\mathsf{R}(A)} $
- Lemma 1. Let $ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $ . Then $ \overline{\mathsf{R}(A^* A)} = \overline{\mathsf{R}(A^* )} $
Minimal-norm Solutions
- An element $ u \in \mathcal{U} $ is called
- a least-squares solution of $ Au =f $ if
- a minimal-norm solution of $ Au =f $ (and is denoted by $ u^\dagger $ ) if
$ \lVert u^\dagger \rVert_\mathcal{U} \leq \lVert v \rVert_\mathcal{U} $ for all least squares solutions $ v $
- a least-squares solution of $ Au =f $ if
- Thm 1. Let $ f \in \mathcal{V} \ \mathrm{and} \ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $. Then the following three assertions are equivalent
- $ u \in \mathcal{U} $ satisfies $ Au = P_{\overline{\mathsf{R}(A)}} f $
- $ u $ is a least squares solution of the inverse problem
- $ u $ solves the normal equation
- Thm 2. Let $ f \in \mathsf{R}(A) \oplus \mathsf{R}(A)^\perp $. Then there exists a unique minimal norm solution $ u^\dagger$ to the inverse problem and all least squares solutions are given by $ \lbrace u^\dagger \rbrace + \mathsf{N}(A) $
Decomposition of compact operators
- Thm 1. Let $ \mathcal{U} $ be a Hilbert space and $ A \in \mathcal{K}(\mathcal{U},\mathcal{U}) $ be self-adjoint. Then there exists an orthonormal basis $ \lbrace x_j \rbrace_{j\in\mathbb{N}} \subset \mathcal{U} \ \mathrm{of} \ \mathsf{R}(A) $ and a sequence of eigenvalues $ \lbrace \lambda_j \rbrace_{j\in\mathbb{N}} \subset \mathbb{R} $ with $ \lvert \lambda_1 \rvert \geq \lvert \lambda_2 \rvert \geq \cdots > 0 $ such that for all $ u \in \mathcal{U} $ we have
The sequence $ \lbrace \lambda_j \rbrace_{j\in\mathbb{N}} $ is either finite or we have $ \lambda_j \to 0 $
Singular Value Decomposition
- the sequence $ \lbrace (\sigma_j, x_j, y_j) \rbrace $ is called singular system or singular value decomposition (SVD) of $ A $
- Let $ A \in \mathcal{K}(\mathcal{U},\mathcal{V}) $. Then there exists
- a not-necessarily infinite null sequence $ \lbrace \sigma_j \rbrace_{j\in\mathbb{N}} $ with $ \sigma_1 \geq \sigma_2 \geq \cdots > 0 $,
- an orthonormal basis $ \lbrace x_j \rbrace_{j\in\mathbb{N}} \subset \mathcal{U} \ \mathrm{of} \ \mathsf{N}(A)^\perp $,
- an orthonormal basis $ \lbrace y_j \rbrace_{j\in\mathbb{N}} \subset \mathcal{V} \ \mathrm{of} \ \overline{\mathsf{R}(A)} $ with
- For all $ u \in \mathcal{U} $ we have the representation
$ Au = \displaystyle \sum_{j=1}^{\infty} \sigma_j \langle u,x_j \rangle y_j $ - For the adjoint operator $ A^* $ we have the representation
$ A^* f = \displaystyle \sum_{j=1}^{\infty} \sigma_j \langle f,y_j \rangle x_j \ \ \forall \ f\in \mathcal{V} $
- For all $ u \in \mathcal{U} $ we have the representation
Moore-Penrose inverse
-
Let $ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $ and let $ \widetilde{A} := A\mid_{\mathsf{N}(A)^\perp} : \mathsf{N}(A)^\perp \to \mathsf{R}(A) $ denote the restriction of $ A $ to $ \mathsf{N}(A)^\perp $
The Moore-Penrose inverse $ A^\dagger $ is defined as the unique linear extension of $ \widetilde{A}^{-1} $ to
with
. -
Thm 1. Let $ A \in \mathcal{L}(\mathcal{U},\mathcal{V}) $. Then $ A ^\dagger $ is continuous, i.e. $ A ^\dagger \in \mathcal{L}(\mathsf{D},\mathcal{U}) $, if and only iff $ \mathsf{R}(A) $ is closed.
- Lemma 1. The MP inverse $ A^\dagger $ satisfies $ \mathsf{R}(A^\dagger) = \mathsf{N}(A)^\perp $ and the MP equations
- $ A A^\dagger A = A $ ,
- $ A^\dagger A A^\dagger = A^\dagger $,
- $ A^\dagger A = I - P_{\mathsf{N}(A)} $,
- $ A A^\dagger = P_{\overline{\mathsf{R}(A)}}\mid_{\mathsf{D}(A^\dagger)} $,
where $ P_\mathsf{N} $ and $ P_\overline{\mathsf{R}} $ denote the orthogonal projections on $ \mathsf{N} \ \mathrm{and} \ \overline{\mathsf{R}} $, respectively
-
Thm 2. For each $ f \in \mathsf{D}(A^\dagger) $, the minimal norm solution $ u^\dagger $ to the inverse problem is given via
. -
Thm 3. Let $ A \in \mathcal{K}(\mathcal{U},\mathcal{V}) $ with an infinite dimensional range. Then, the MPi of $ A $ is discontinuous
-
Thm 4. Let $ A \in \mathcal{K}(\mathcal{U},\mathcal{V}) $ with singular system $ \lbrace (\sigma_j, x_j, y_j) \rbrace_{j\in\mathbb{N}} $ and $ f \in \mathsf{D} (A^\dagger) $
then the Moore-Penrose inverse of $ A $ can be written as
$ A^\dagger f = \displaystyle \sum_{j = 1}^{\infty} \sigma_j^{-1} \langle f,y_j \rangle x_j $- The representation makes it clear that the inverse is unbounded. Indeed, taing the sequence $ y_j $ we note that $ \lVert A^\dagger y_j \rVert = \sigma_j^{-1} \to \infty $, although $ \lVert y_j \rVert = 1 $
Picard criterion
-
We say that the data $ f $ satisfy the Picard criterion, if
-
Thm 1. Let $ A \in \mathcal{K}(\mathcal{U},\mathcal{V}) $ with singular system $ \lbrace (\sigma_j, x_j, y_j) \rbrace_{j \in \mathbb{N}} $, and $ f \in \overline{\mathsf{R}(A)} $. Then $ f \in \mathsf{R}(A) $ if and only if the Picard criterion is met
ill-posed
- An ill-posed inverse problem is mildly ill-posed if the singular values decay at most with polynomial speed, i.e. there exist $ \gamma, C > 0 $ such that $ \sigma_j \geq C j^{-\gamma} $ for all $ j $. We call the ill-posed inverse problem severely ill-posed if its singular values decay faster than with polynomial speed, i.e. for all $ \gamma, C > 0 $ one has that $ \sigma_j \leq C j^{-\gamma} $ for $ j $ sufficiently large.
Regularisation Theory
Since the Moore-Penrose inverse of $ A $ is unbounded
Variational Regularisation
The variation formulation of Tikhonov regularisation for some data $ f_\delta \in \mathcal{V} $
* fidelity function $ \mathcal{F}(Au,f) = \lVert Au - f_\delta \rVert^2 $
* regulariser $ \mathcal{J}(U) = \lVert u \rVert^2 $
the variational regularisation problem is
Characteristic function
- Let $ \mathcal{C} \subset \mathcal{U} $ be a set.
The function $ \mathcal{X}_\mathcal{C} : \mathcal{U} \to \overline{\mathbb{R}} $,
is called the characteristic function of the set $ \mathcal{C} $ - The CF $ \mathcal{X}_\mathcal{C}(u) $ is convex iff $ \mathcal{C} $ is a convex set
Let $ E : \mathcal{U} \to \overline{\mathbb{R}} $ be a functional.
Proper
- A functional E is called proper if
the effective domain dom(E) is not empty
Convex
- A functional E is called convex if
$ E (\lambda u + (1 - \lambda) v) \leq \lambda E(u) + (1-\lambda) E(v) $
for all $ \lambda \in (0,1) $ and all $ u,v \in dom(E) \ \mathrm{with} \ u \neq v $ - It is called strictly convex if the inequality is strict
Fenchel conjugat
- The functional E is called the Fenchel conjugate of E, such that
$ E^* (p) = \displaystyle \sup_{u\in \mathcal{U}} \lbrace \langle p,u \rangle - E(u)\rbrace $ - For any functional $ E : \mathcal{U} \to \overline{\mathbb{R}} $ the following inequallity holds:
$ E^{* * } := (E^* )^* \leq E $
Lower-semicontinuous l.s.c
- If E is proper, l.s.c and convex, then
$ E^{* * } = E $
Subdifferential
- A functional E is called subdifferentiable at $ u \in \mathcal{U} $, if there exists an element $ p \in \mathcal{U}^* $ such that
$ E(v) \geq E(u) + <p,v-u> \ \forall v \in \mathcal{U} $ - $ p $ also called a subgradient at position $ u $
- the collection of all subgradients at position $ u $ is called subdifferential of $ E $ at $ u $, such that
$ \partial E(u) := \lbrace p \in \mathcal{U}^* \mid E(v) \geq E(u) + <p, v-u>, \ \forall v \in \mathcal{U} \rbrace $
Minimiser
- We call $ u^* $ a minimiser of $ E $ such that
$ u^* \in \mathcal{U} $ solves the minimisation problem $ \displaystyle \min_{u \in \mathcal{U}} E (u) $
if and only if $ E(u^* ) \leq \infty $ and $ E(u^* ) \leq E(u), \ \forall u \in \mathcal{U} $ - An element $ u \in \mathcal{U} $ is a minimiser of $ E $ if and only if $ 0 \in \partial E(u) $
Weak compact convex subset 4.1.19
- Let $ E $ be a proper convex fucntion and $ u \in \ \mathrm{dom} \ (E) $ . Then $ \partial E(u) $ is a weak-* compact convex subset of $ \mathcal{U}^* $ .
Bregman distances
- Let $ E $ be a convex functional. Moreover, let $ u,v \in \mathcal{U}, \ E(v) \leq \infty \ \mathrm{and} \ q \in \partial E(v) $. Then the (generalised) Bregman distance of $ E $ between $ u $ and $ v $ is defined as
.
In general, the Bregman distances are not symmetric that $ D^q_E (u,v) = 0 $ does not imply $ u =v $, overcome the issue, one can introduce the symmetric Bregman distance
- Let $ E $ be a convex functional. Moreover, let $ u,v \in \mathcal{U}, \ E(u) \leq \infty, E(v) \leq \infty \ \mathrm{and} \ q \in \partial E(v) $. Then the symmetric Bregman distance of $ E $ between $ u $ and $ v $ is defined as
.
Absolutely one-homogeneous functionals
- A functional $ E $ is called absolutely one-homogeneous if
- Prop 1. Let $ E(\cdot) $ be a convex absolutely one-homogeneous functional and let $ p \in \partial E(u) $. Then the following equality holds:
. - Prop 2. Let $ E(\dot) $ be a proper, convex, l.s.c. and absolutely one-homogeneous functional. Then the Fenchel conjugate $ E^* (\cdot) $ is the characteristic function of the convex set $ \partial E(0) $.
- Prop 3. For any $ u \in \mathcal{U}, p \in \partial E(u) $ if and only if $ p \in \partial E(0) $ and $ E (u) = (p,u) $.
Coercive
- A functional E is called coercive, if for all $ \lbrace u_j \rbrace_{j\in \mathbb{N}} $ with $ \lVert u_j \rVert_\mathcal{U} \to \infty $ we have $ E(u_j) \to \infty $
Level set
- $ L_c (f) = \lbrace (x_1, \cdots, x_n ) \mid f(x_1 , \cdots x_n ) = c \rbrace $
- Sub-level set of f is
- $ L_c^- (f) = \lbrace (x_1, \cdots, x_n ) \mid f(x_1 , \cdots x_n ) \leq c \rbrace $
J-minimising solutions
- Suppose that the fidelity term is such that the optimisation problem
has a solution for any $ f \in \mathcal{V} $. Let- $ u^\dagger_\mathcal{J} \in \arg \min_{u\in\mathcal{U}} \mathcal{F}(Au,f) $ and
- $ \mathcal{J}(u^\dagger_\mathcal{J})\leq \mathcal{J}(\tilde{u})\ \forall \ \tilde{u}\in \arg \min_{u\in\mathcal{U}}\mathcal{F}(Au,f) $
Then $ u^\dagger_\mathcal{J} $ is called a $ \mathcal{J} $ -minimising solution of $ Au = f $
Main result of well-posedness
- Let $ \mathcal{U} $ and $ \mathcal{V} $ be Banach spaces and $ \tau_\mathcal{U} $ and $ \tau_\mathcal{V} $ some topologies (not necessarily induced by the norm) in $ \mathcal{U} $ and $ \mathcal{V} $, respectively. Suppose that problem $ Au = f $ is solvable and the solution has a finite value of $ \mathcal{J} $. Assume also that
- $ A : \mathcal{U} \to \mathcal{V} $ is $ \tau_\mathcal{U} \to \tau_\mathcal{V} $ continuous;
- $ \mathcal{J}: \mathcal{U} \to \overline{\mathbb{R_+}} $ is proper, $ \tau_\mathcal{U} $ -l.s.c and its non-empty sublevel-sets $ \lbrace u \in \mathcal{U} : \mathcal{J}(u) \leq C \rbrace $ are $ \tau_\mathcal{U} $ -sequentiallly compact;
- $ \mathcal{F}: \mathcal{V} \times \mathcal{V} \to \overline{\mathbb{R_+}} $ is proper, $ \tau_\mathcal{V} $ -l.s.c in the first argument and norm-l.s.c in the second ne and satisfies
$ \ \forall \ f\in \mathcal{V} \ \mathrm{and} \ f_\delta \in \mathcal{V} \ \mathrm{s.t.} \ \lVert f_\delta - f \rVert \leq \delta $ ; - there exists an a priori parameter choice rule $ \alpha = \alpha(\delta) $ such that $ \displaystyle \lim_{\delta\to 0} \alpha(\delta) = 0 \ \mathrm{and} \ \displaystyle \lim_{\delta\to0} \frac{C(\delta)}{\alpha(\delta)} = 0 $
Then
i. there exists a $ \mathcal{J} $ -minimising solution $ u^\dagger_\mathcal{J} $ of $ Au=f $;
ii. for any fixed $ \alpha > 0 $ and $ f_\delta \in \mathcal{V} $ there exists a minimiser $ u^\alpha_\delta \in \arg \min_{u\in\mathcal{U}} \mathcal{F}(Au,f_\delta) + \alpha\mathcal{J}(u) $;
iii. the parameter choice rule $ \alpha = \alpha(\delta) $ from Assumption(4) guarantees that $ u_\delta := u^{\alpha(\delta)}_ \delta \xrightarrow[]{\tau_\mathcal{U}} u^\dagger_\mathcal{J} $ (possibble, along a subsequence) and $ \mathcal{J}(u_\delta) \to \mathcal{J}(u^\dagger_\mathcal{J}) $
Total Variation Regularisation
- Let $ \Omega \subset \mathbb{R}^n $ be a bounded domain and $ u \in L^1(\Omega) $. Let $ \mathcal{D}(\Omega, \mathbb{R}^n) $ be the following set of vector-valued test function (i.e. functions that map from $ \Omega $ to $ \mathbb{R}^n $)
. - total variation of $ u \in L^1(\Omega) $ is defined as follows
Dual Perspective
Numerical Optimisation Methods
Example
Topics in Convex Optimisation
Numerical Solution of Differential Equations
Calculus
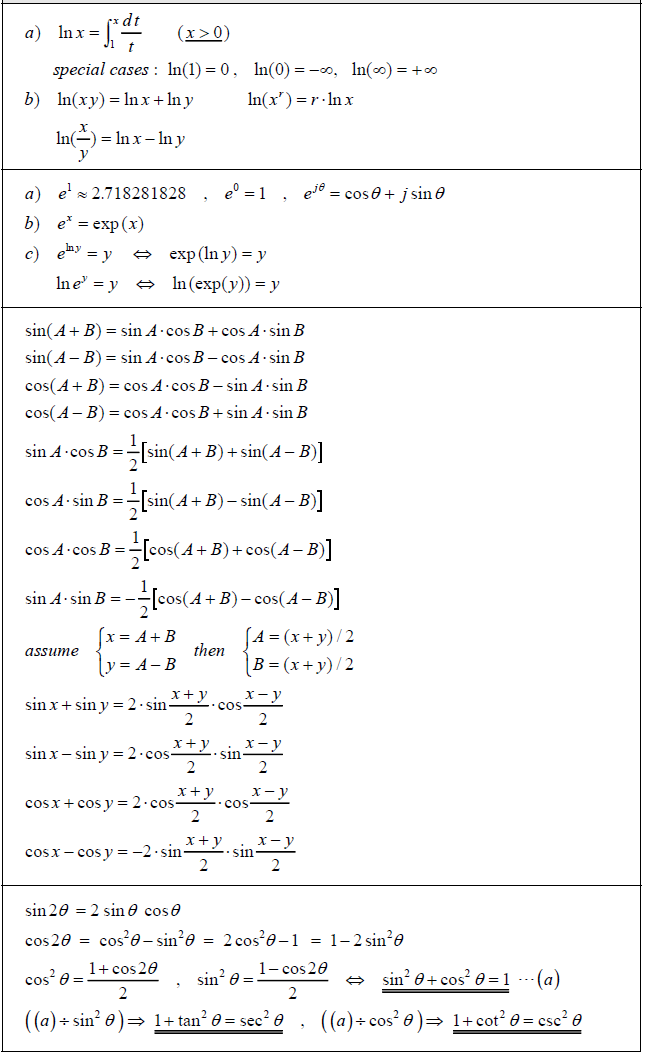
Series Expansion
Complex exponential formula
$ \sin(x) = \displaystyle \frac{e^{ix}-e^{-ix}}{2i} $
$ \cos(x) = \displaystyle \frac{e^{ix}+e^{-ix}}{2} $
hyperbolic function: $ \sinh(x) = -i \sin(ix) \; \cdots $